Sensor localization: appendix
In this notebook, we detail the construction of the observation \(y\).
[1]:
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
[2]:
small_size = 16
medium_size = 20
bigger_size = 24
plt.rc("font", size=small_size) # controls default text sizes
plt.rc("axes", titlesize=small_size) # fontsize of the axes title
plt.rc("axes", labelsize=medium_size) # fontsize of the x and y labels
plt.rc("xtick", labelsize=small_size) # fontsize of the tick labels
plt.rc("ytick", labelsize=small_size) # fontsize of the tick labels
plt.rc("legend", fontsize=small_size) # legend fontsize
plt.rc("figure", titlesize=bigger_size) # fontsize of the figure title
[3]:
df_sensors = pd.read_csv("./sensor_loc/data/sensors_localizations_rescaled.csv")
df_sensors
[3]:
| sensor_id | known | x | y | |
|---|---|---|---|---|
| 0 | 0 | True | 0.500000 | 0.300000 |
| 1 | 1 | True | 0.300000 | 0.700000 |
| 2 | 2 | True | 0.700000 | 0.700000 |
| 3 | 3 | False | 0.574774 | 0.906946 |
| 4 | 4 | False | 0.365064 | 0.099119 |
| 5 | 5 | False | 0.457822 | 0.234989 |
| 6 | 6 | False | 0.224760 | 0.481582 |
| 7 | 7 | False | 0.854572 | 0.039176 |
| 8 | 8 | False | 0.551816 | 0.735527 |
| 9 | 9 | False | 0.134968 | 0.819797 |
| 10 | 10 | False | 0.855822 | 0.781374 |
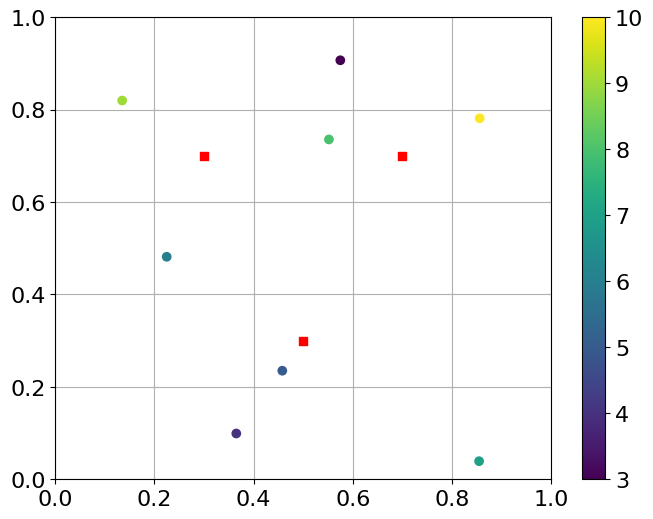
True position of the sensors:
[4]:
plt.figure(figsize=(8, 6))
plt.scatter(
df_sensors.loc[df_sensors["known"], "x"],
df_sensors.loc[df_sensors["known"], "y"],
c="r",
marker="s",
)
plt.scatter(
df_sensors.loc[~df_sensors["known"], "x"],
df_sensors.loc[~df_sensors["known"], "y"],
c=df_sensors.loc[~df_sensors["known"]].index, # "k",
marker="o",
)
plt.grid()
# plt.axis("equal")
plt.xlim([0, 1])
plt.ylim([0, 1])
plt.colorbar()
plt.show()
Generation of observations
[5]:
Yb = np.array(
[
[0.61025878, 0.36309862, 0.0],
[0.21709465, 0.0, 0.0],
[0.09053334, 0.48509278, 0.0],
[0.0, 0.26174627, 0.0],
[0.0, 0.0, 0.0],
[0.0, 0.24391333, 0.18314159],
[0.0, 0.19819737, 0.0],
[0.0, 0.0, 0.18866747],
]
)
Ys = np.array(
[
[0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
[0.0, 0.0, 0.15842067, 0.37163305, 0.49768649, 0.0, 0.0, 0.82343461],
[0.0, 0.15842067, 0.0, 0.0, 0.44686253, 0.0, 0.0, 0.0],
[0.0, 0.37163305, 0.0, 0.0, 0.0, 0.41708222, 0.32975727, 0.0],
[0.0, 0.49768649, 0.44686253, 0.0, 0.0, 0.0, 0.0, 0.0],
[0.0, 0.0, 0.0, 0.41708222, 0.0, 0.0, 0.0, 0.30952227],
[0.0, 0.0, 0.0, 0.32975727, 0.0, 0.0, 0.0, 0.0],
[0.0, 0.82343461, 0.0, 0.0, 0.0, 0.30952227, 0.0, 0.0],
]
)
[6]:
plt.imshow(Yb)
plt.show()
[7]:
list_dict_obs = []
# known - unknown observations
for i in range(3):
for j in range(3):
dict_obs = {
"sensor_id_1": i,
"sensor_id_2": j,
"observed": False if i != j else True,
"y": -1 if i != j else 0,
}
list_dict_obs.append(dict_obs)
for i in range(3):
for j in range(8):
dict_obs = {
"sensor_id_1": i,
"sensor_id_2": j + 3,
"observed": Yb[j, i] > 0,
"y": Yb[j, i] if Yb[j, i] > 0 else -1,
}
list_dict_obs.append(dict_obs)
dict_obs = {
"sensor_id_1": j + 3,
"sensor_id_2": i,
"observed": Yb[j, i] > 0,
"y": Yb[j, i] if Yb[j, i] > 0 else -1,
}
list_dict_obs.append(dict_obs)
for i in range(8):
for j in range(8):
dict_obs = {
"sensor_id_1": i + 3,
"sensor_id_2": j + 3,
"observed": Ys[j, i] > 0 if i != j else True,
"y": Ys[j, i] if Ys[j, i] > 0 or i == j else -1,
}
list_dict_obs.append(dict_obs)
df_obs = pd.DataFrame.from_records(list_dict_obs)
df_obs = df_obs.sort_values(["sensor_id_1", "sensor_id_2"])
df_obs.head(12)
df_obs.to_csv("./sensor_loc/data/observation.csv", index=False)
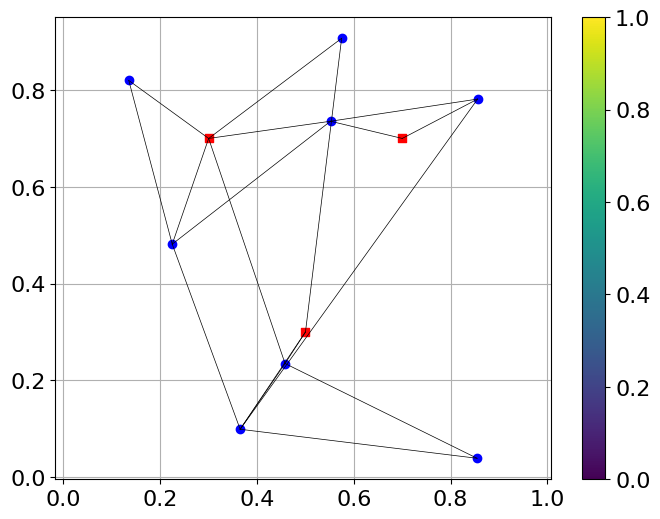
Plotting the actual observation graph
[11]:
plt.figure(figsize=(8, 6))
# plot edges
for dict_ in list_dict_obs:
id_0, id_1 = dict_["sensor_id_1"], dict_["sensor_id_2"]
if id_0 < id_1 and dict_["observed"]:
plt.plot(
[df_sensors.at[id_0, "x"], df_sensors.at[id_1, "x"]],
[df_sensors.at[id_0, "y"], df_sensors.at[id_1, "y"]],
"k-",
linewidth=0.5,
)
# plot known points
plt.scatter(
df_sensors.loc[df_sensors["known"], "x"],
df_sensors.loc[df_sensors["known"], "y"],
c="r",
marker="s",
)
# plot unknown points
plt.scatter(
df_sensors.loc[~df_sensors["known"], "x"],
df_sensors.loc[~df_sensors["known"], "y"],
c="b",
marker="o",
)
plt.grid()
plt.axis("equal")
# plt.xlim([0, 1])
# plt.ylim([0, 1])
plt.colorbar()
plt.show()
[ ]: